tl;dr
- Decompile the given RBF file
- Extract the low level instructions.
- Write a script to plot the lines.
Challenge Points: 221
Challenge Solves: 44
Solved by: f4lc0n, g4rud4,stuxn3t
Initial Analysis
This challenge looks similar to last year’s EV3 challenge. But this time a compiled project was given instead of network logs.
So, after a couple of minutes surfing the internet about decompiling ev3 project files, I found this website which actually retrieves the low level instructions sent to the MindStorm Robot. After uploading the given rbf file to the website it listed out all the decompiled instructions in the file.
Some of the instructions looked like this
1 | [f4lc0n@arch-linux ~]$ cat operations.txt | head |
So, now we will write a check function for drawing the lines according to the instructions.
1 | def check(arg): |
Summing up with the two functions, the final script is,
1 | #!/usr/bin/env python2 |
Flag
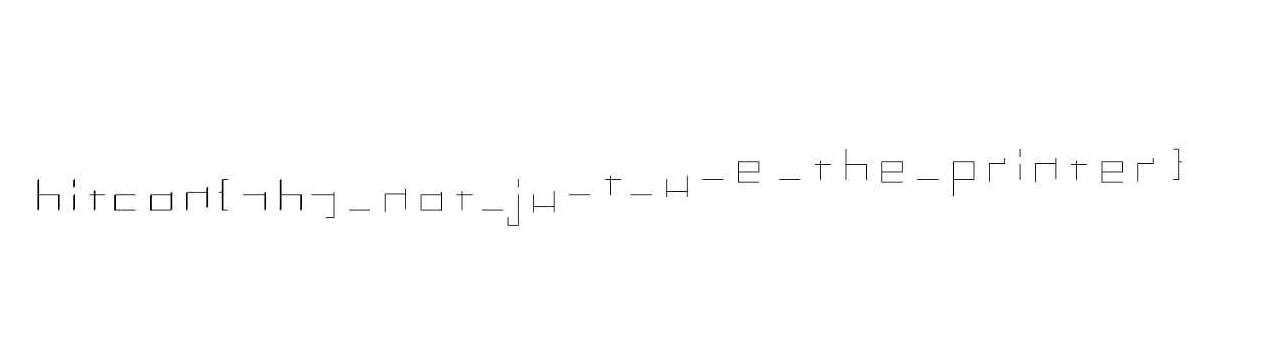
After correcting a few characters, we get the flag
Flag: hitcon{why_not_just_use_the_printer}